
Multi-modal fusion · Arctic
One picture, built from sensors that disagree.
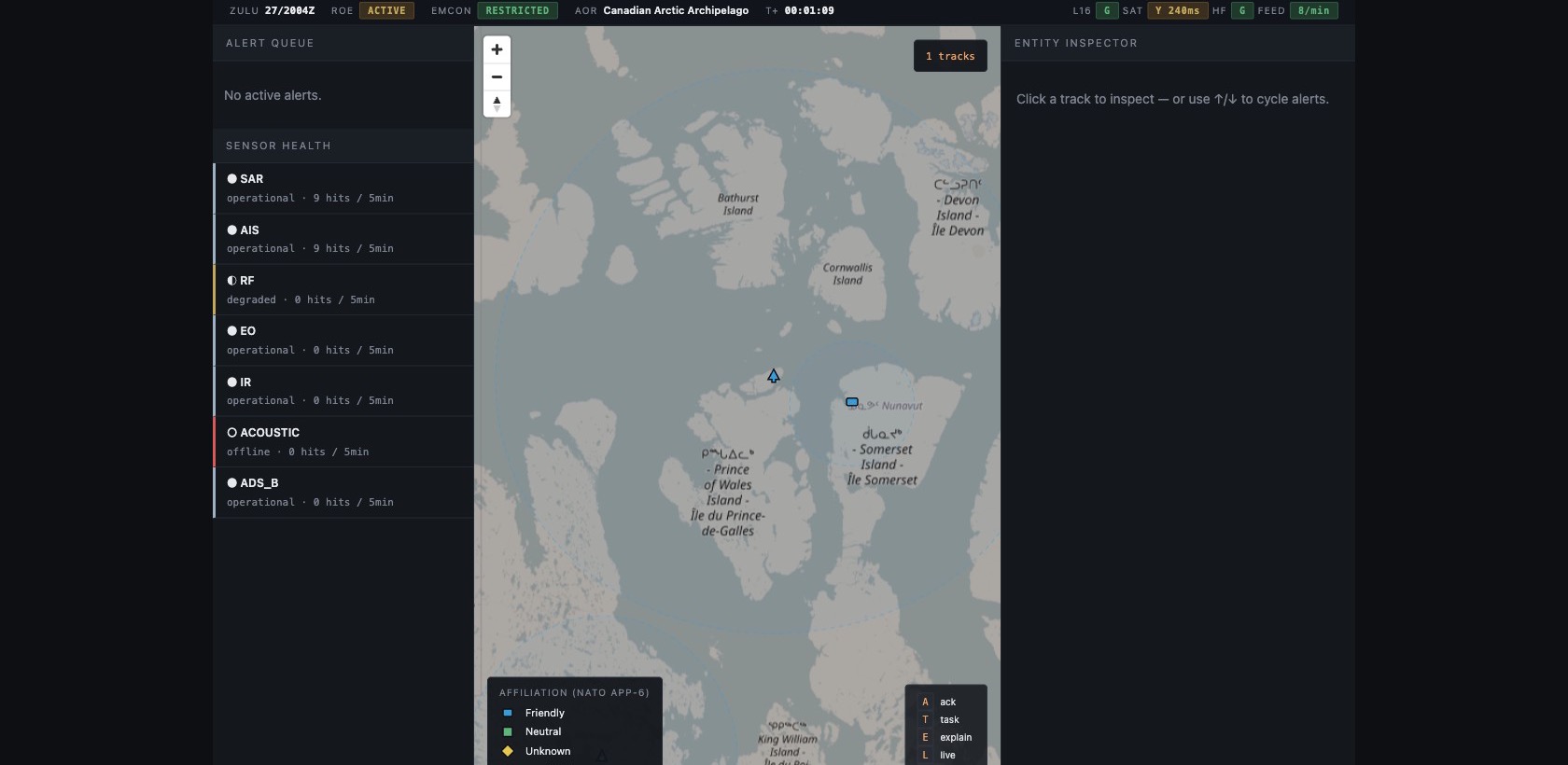
Nortex fuses radar, vessel kinematics, and emissions into tracked entities on a live map — each carrying calibrated uncertainty and the evidence behind it.
The common operating picture itself.
Not a feed into someone else's map. Nortex is the host — the fused picture an operator reads, with the reasoning kept attached to every track.
Three sensor types, end to end.
Synthetic-aperture radar, vessel kinematics, and RF emissions enter as separate streams and leave as one resolved set of entities.
Tracks, not detections.
Correlated returns become tracked entities in real time, each with a position, a class, and a confidence the operator can read at a glance.
Evidence stays attached.
Every track drags its evidence chain behind it. The operator can ask why a thing is on the map, and the map answers.
The picture shows what it does not know.
Calibrated uncertainty is rendered on the map, not buried in a log. Where the evidence is thin, Nortex abstains rather than guessing — and says so.
Trust-graded outputs.
A confident track and a tentative one do not look the same. The operator sees the grade before acting on it.
Abstention over false certainty.
When the sensors cannot agree, the system holds. A missing answer the operator can trust beats a confident answer that is wrong.
Built for the place the network ends.
A single self-contained binary. No cloud, no round-trip, no dependency on a link that may not be there.
01
Edge-native by design.
Fusion runs where the sensors are — on the patrol aircraft, at the remote site, on the disconnected northern edge.
02
One binary, no backend.
Nothing to stand up, nothing to phone home. The picture computes locally and stays local.
03
Disconnected is the default.
The Arctic and the maritime-patrol cockpit are built for, not patched around. Loss of link does not mean loss of picture.
A track you can put your name behind.
Every fused entity carries its evidence and ships an alliance-interoperable label, signed at the point of fusion — federation-ready and independently verifiable.
Tamper-evident audit trail.
The chain from raw return to fused track is recorded and machine-checkable. A reviewer can retrace every step.
Signed at the point of fusion.
The label is bound to the evidence the moment the track is formed, not bolted on after the fact.
Alliance-interoperable.
Labels travel across partners in a shared format. The picture is ready to federate the day it is needed.
Where Nortex sits, plainly.
Nortex is the host picture. SensoFuse is the gate that governs what that picture is allowed to show. Nexus is the operator cockpit elsewhere. The system fuses, computes, and withholds. The operator decides.
What you see here is a representative lab demonstration on synthetic, open data. It is not a fielded or operational deployment, and we will not describe it as one.
See the picture, end to end.
We walk through a live fusion of three sensor types, the uncertainty on the map, and the evidence behind a single track.